


2
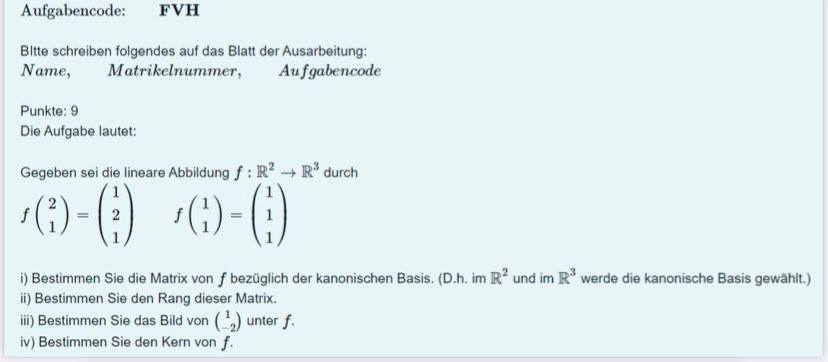
Um die Darstellungsmatrix von \(f\) bezüglich der kanonischen Basis zu bestimmen, musst du zunächst die Bilder der Einheitsvektoren bestimmen. So gilt für das Bild der ersten Einheitsvektors $$f(1,0)^T=f(2,1)^T-f(1,1)^T=(1,2,1)^T-(1,1,1)^T=(0,1,0)^T$$ und für das Bild des zweiten Einheitsvektors $$f(0,1)^T=2 \cdot f(1,1)^T-f(2,1)^T=\dots=(1,0,1)^T$$Jetzt musst du für die Darstellungsmatrix \(A\) nur noch die Bilder der Einheitsvektoren als Spalten aufschreiben.
Diese Antwort melden
Link
geantwortet

mathejean
Student, Punkte: 10.87K
Student, Punkte: 10.87K
Vielen Dank :) Ich verstehe leider gerade überhaupt nicht, worum es überhaupt geht, um ehrlich zu sein, obwohl ich der Theorie und den meisten Übungen mächtig bin :/ Ich errechne mir beim ersten Schritt die kanonische Basis, indem ich die beiden Abbildungsvektoren subtrahiere (woher soll man das wissen?) Und Punkt 2 verstehe ich leider überhaupt nicht mehr
─
infomarvin
17.02.2021 um 20:45
Die 1. Lösung dürfte auch falsch sein - da muss man anscheinend über Spaltenumformungen die Basis des Kerns berechnen (warum auch immer :/)
─
infomarvin
17.02.2021 um 20:49
Es gibt immer mehrere Lösungsmethoden und die Basis die du beim ersten raus hast sollte so stimmen
─
mathejean
17.02.2021 um 21:13
Bezüglich der Aufgabe die du nicht verstehst, hattet ihr schon Basiswechsel und Transformationsmatrizen gemacht? Hiermit würde sich die Aufgabe nämlich anschaulicher darstellen lassen
─
mathejean
17.02.2021 um 21:15
Ansonsten habe ich zur Bestimmung der Bilder der Einheitsvektoren nur die Linearität von f ausgenutzt
─
mathejean
17.02.2021 um 21:17
Doch den haben wir schon gemacht, aber eben nur kurz - ich hab mir aufgrund der kurzen, sehr abstrakten Erklärung nur das Video von Daniel Jung angeschaut (wenn ich eine Abbildungsmatrix habe - also zwei Vektoren, zusammengefasst) und auf der einen Seite mit einem Vektor multipliziere, soll das gleiche Ergebnis herauskommen, wie wenn ich auf der anderen Seite mit einer anderen Matrix (einer anderen Basis) multipliziere. Dann errechne ich mir mit was ich die eine Matrix multiplizieren muss, um schlussendlich die Matrizen "gleichzusetzen" - bin nur mittlerweile wirklich am Verzweifeln
─
infomarvin
17.02.2021 um 21:29
Ich glaube ich habe jetzt ein passendes Video gefunden - die Frage ist nur mehr, wie weiß ich von welcher in welche Basis ich transformieren muss
─
infomarvin
17.02.2021 um 22:06
Ich versuche dir das ganze mal ohne Basiswechsel zu erklären: Ersteinmal musst du verstehen, dass du an die Darstellungsmatrix durch das Bild der Einheitsvektoren kommst. Wenn du das verstanden hast, musst du dir also überlegen, wie du von den gegebenen Vektoren auf die Einheitsvektoren kommst, hierzu müssen die gegebenen Vektoren linear unabhängig sein, was in diesem Fall auch so ist. Du suchst also eine Linearkombination der gegebenen Vektoren, sodass diese den jeweiligen Einheitsvektor bilden. Dadurch, dass \(f\) linear ist, kannst du nun diese Linearkombinationen nutzen, um auf das Bild der Einheitsvektoren zu kommen.
─
mathejean
18.02.2021 um 09:17
Also hab ich zwei Basen jeder Dimension. Ich koordinatisiere von der 2 Dimensionalen in die 3 Dimensionale Basis, schreibe die 2 Dimensionale (die 2 drüber) und will oben quasi die Einheitsmatrix stehen haben, und unten ist die Abbildungsmatrix? Aber woher weiß ich von wo nach wo ich Koordinatisieren muss, wie gesagt,'ich hab so wie den Wikipedia Artikel verstanden - dass es eine kanonische Basis des R2 gibt und die wird Linear ins R3 kombiniert (ich weiß nie was gemeint ist)
Wenn stünde koordinatisieren Sie von der 2 Dimensionalen in die 3 Dimensionale Basis wärs eindeutig (was sagt dann der Wiki-Artikel aus zb (1 0) eine kanonische => ins R3 (3 0 1) dann nehm ich für die erste Koordinate 3x, und für die 3. 3x ─ infomarvin 18.02.2021 um 16:12
https://youtu.be/CR7e7Zc0QLg das Video anzuschauen, wär schlauer gewesen 😅
─
infomarvin
18.02.2021 um 16:14
f() <=> A * x = c, c und x habe ich schon, fehlt a, dann errechne ich mir von x den Einheitsvektor, und unten steht A aber warum das funktioniert verstehe ich nicht ganz, ich errechne mir ja unten, wenn oben der Einheitsvektor steht die Inverse (was ja nicht funktioniert, wenn A nicht quadratisch ist)
Außerdem verstehe ich nicht ganz, warum man den Kern f von der Abbildungsmatrix berechnet und nicht von der A * X = 0 (so ist der Kern definiert ) ─ infomarvin 18.02.2021 um 16:20
Außerdem verstehe ich nicht ganz, warum man den Kern f von der Abbildungsmatrix berechnet und nicht von der A * X = 0 (so ist der Kern definiert ) ─ infomarvin 18.02.2021 um 16:20
Wenn du den Kern der Abbildungsmatrix \(A\) berechnet, löst du ja auch das LGS \(Ax=0\). Es gilt nämlich \(f(x)=Ax\) und somit gilt \(f(x)=0\Leftrightarrow Ax=0\)
─
mathejean
18.02.2021 um 17:48
Auch würde ich dir empfehlen, hier erstmal ohne Basiswechsel zu arbeiten, da du damit ja noch unsicher bist. Das ganze geht nämlich auch nur über die Linearität, wie ich es oben beschrieben habe.
─
mathejean
18.02.2021 um 17:50
Zu Matrizen kann allerhöchstens nur eine Frage kommen - ich verstehe es grundlegend, immer wenn f(2 2) = (3 3 3 ) z.B. Dann muss die Abbildungsmatrix bezüglich der kanonischen Basis ausgerechnet werden, dann ist lt. Fortsetzungssatz durch die Linearkombination jedes Bild cj eindeutig bestimmt - ich habe nur gerade ein Beispiel gefunden f(1 -3) = (3 0 - 1); f(3 -2) = ( 3 0 -1) => im R^(2) kann es nur zwei linear unabhängige Vektoren geben, wenn die auf das gleiche Bild zeigen, dann kann die Abbildung nicht eindeutig bestimmt sein oder - habe es versucht so zu lösen und bin auf ganz komische Ergebnisse gekommen (ich glaube mit Abbildungsmatrix Rang 1 - und Einträgen der Abbildungsmatrix nur in Zeile 1 und 3 (Zeile 2 ) nicht, insofern kann der Raum des R^(3) gar nicht aufgespannt werden, weil eine Dimension fehlt - trotzdem muss man zu einem anderen Bild die Lösung bestimmen ) - allgemein dürfen bei der Basistransformation z.B. R^(2) -> R^(3) nur Spaltenoperationen durchgeführt werden, oder? Weil, ich ja bspw. bei R^(2) -> R^(3) bei der Basistransformation die 3. Zeile der R^(3), die Zeile nie erfassen würde
Auf jeden Fall vielen Dank - und Danke für deine Geduld :) ─ infomarvin 18.02.2021 um 18:27
Auf jeden Fall vielen Dank - und Danke für deine Geduld :) ─ infomarvin 18.02.2021 um 18:27