Die Idee mit der Drehmatrix ist gut, man muss aber nicht unbedingt eine Matrix aufstellen.
Die gewünschte Drehung entspricht einem Homomorphismus, ich nenne ihn mal \( \varphi \). Man kann sich nun überlegen, dass gilt
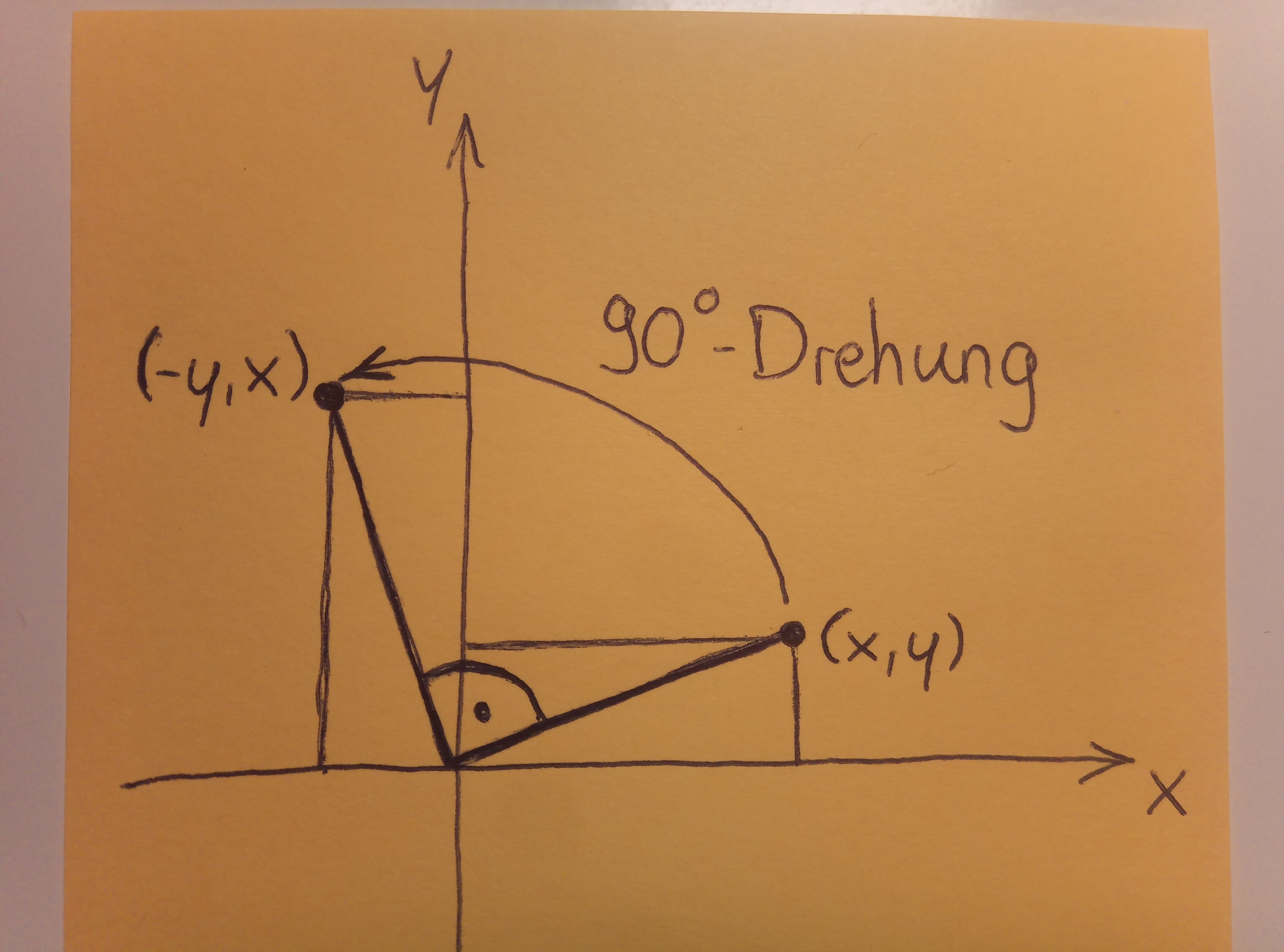
\( \varphi( \vec{e_1}) = \vec{e_2} \)
\( \varphi( \vec{e_2}) = - \vec{e_1} \)
\( \varphi( \vec{e_3}) = \vec{e_3} \)
(Ich bezeichne hier mit \( \vec{e_i} \) den \(i\)-ten Standardbasisvektor)
Ein beliebiger Vektor zur Ebene hat die Form
\( \vec{p} = \begin{pmatrix} x_0 \\ 6-2x_0-2z_0 \\ z_0 \end{pmatrix} = x_0 \vec{e_1} + (6-2x_0-2z_0) \vec{e_2} + z_0 \vec{e_3} \).
Sein Bild unter der Drehung ist dann
\( \varphi( \vec{p}) \) \( = x_0 \varphi( \vec{e_1}) + (6-2x_0-2z_0) \varphi( \vec{e_2}) + z_0 \varphi( \vec{e_3}) \) \( = x_0 \vec{e_2} + (6-2x_0-2z_0)(- \vec{e_1}) + z_0 \vec{e_3} = \begin{pmatrix} 2x_0+2y_0-6 \\ x_0 \\ z_0 \end{pmatrix} \)
Wir erhalten also als neue Koordinaten
\( x = 2x_0+2y_0-6 \)
\( y = x_0 \)
\( z = z_0 \)
Daraus folgt dann die Ebenengleichung
\( E^*: x-2y-2z=-6 \)
Student, Punkte: 7.13K