
Hey,
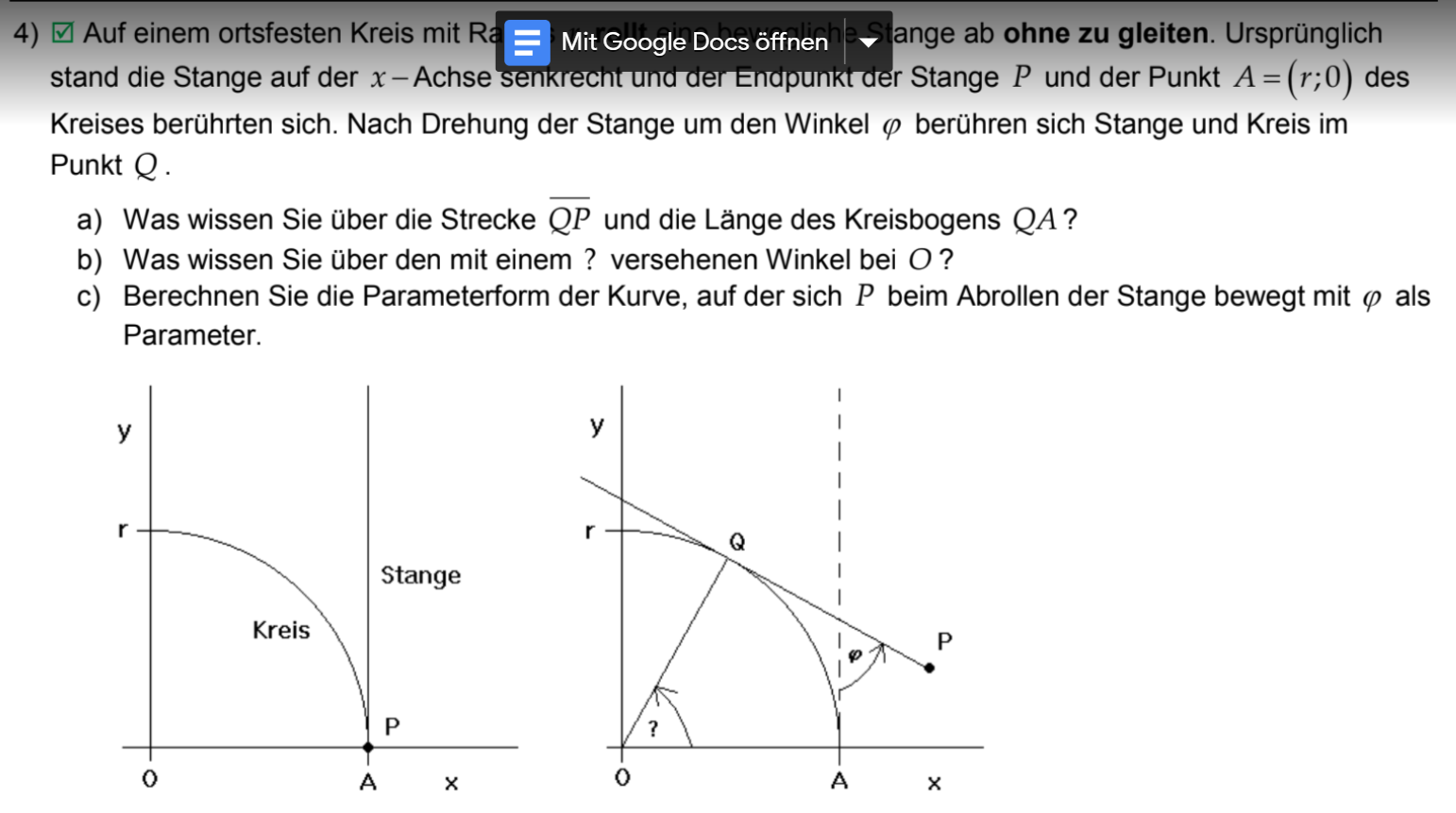
a) ergibt ja \( \bar{QP} = QA = r \cdot \varphi \) und in b) erhält man "?" = \( \varphi \).
Q sitzt auf dem Viertelkreis , somit ist \( \vec{OQ} = \begin{pmatrix} r\cdot cos(\varphi) \\ r \cdot sin(\varphi) \end{pmatrix} mit \: 0 \le \varphi \le \frac \pi 2 \).
\( \vec{QP} \) steht senkrecht auf \( \vec{OQ} \) und hat die Länge \( r \cdot \varphi \) (siehe a))
Es ergibt sich \( \vec{QP} = r \cdot \varphi \cdot \begin{pmatrix} sin(\varphi) \\ -cos(\varphi ) \end{pmatrix} \).
Jetzt müssen wir es nur noch zusammensetzen:
\( \vec{OP} = \vec{OQ} + \vec{QP} = \: ... \: \begin{pmatrix} r \cdot cos(\varphi) + r \cdot \varphi \cdot sin(\varphi) \\ r \cdot sin(\varphi) - r \cdot \varphi \cdot cos(\varphi) \end{pmatrix} mit \: 0 \le \varphi \le \frac \pi 2 = f(\varphi) \)
D.h. \( f: \lbrace x(\varphi)= obere Komponente, y(\varphi)= untere Komponente \: mit \: 0 \le \varphi \le \frac \pi 2 \)
[Sry, der Formeleditor ist gerade ausgefallen, ich hoffe, es geht so :)]
Sonstiger Berufsstatus, Punkte: 140